
7x24小時咨詢熱線
400-660-3310
當前位置 : 好學校 東莞智通教育 學習資訊 資訊詳情
在現場調試機器人,示教器的使用必不可少。那么關于示教器中增量、速度百分比、搖桿鎖定、對準、轉到、搖桿速度調節….等手動操縱ABB機器人的小技巧你都掌握了嗎?今天我們來對它們進行了解。
關于增量和速度百分比,在之前《干貨|ABB機器人增量、速度百分比的使用區別》的文章有已經有詳細介紹,這里就不再贅述。
1對準
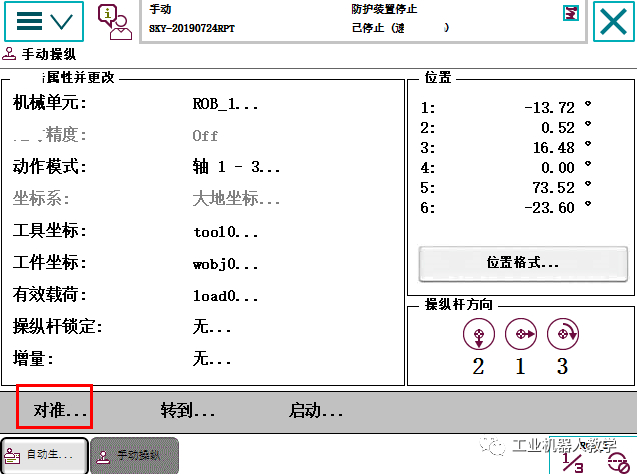
所在位置:主菜單-手動操縱-對準…
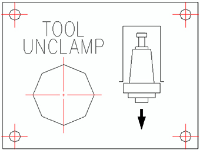
使用說明:對準的含義是使當前選定工具的坐標系Z軸與參考坐標(大地坐標、基座標、工件坐標)的各軸就近對齊。關于就近對準,我們通過下面兩個圖示進行說明。
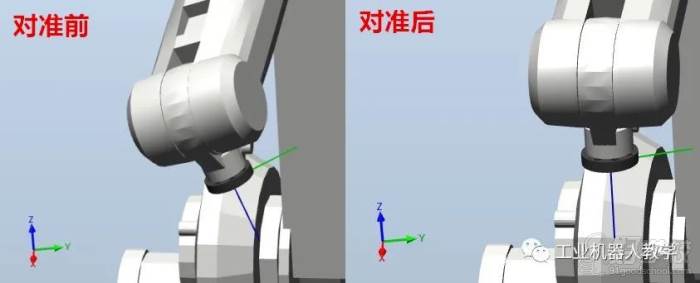
此圖中,工具坐標系Z軸更趨近與大地坐標系的Z軸,所以執行“對準”操作后,工具坐標系Z軸與大地坐標系的Z軸平行。
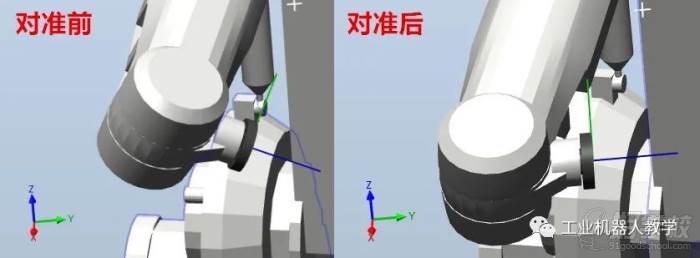
此圖中,工具坐標系Z軸更趨近與大地坐標系的Y軸,所以執行“對準”操作后,工具坐標系Z軸與大地坐標系的Y軸平行。
2操縱桿鎖定
所在位置:主菜單-手動操縱-操縱桿鎖定
使用說明:用于限制操縱桿的有效方向。有無、水平方向、垂直方向、旋轉四種設定。選擇哪一個設定,相對應的方向將會失效。

當選擇水平方向,則操縱桿水平運動失效,垂直方向和旋轉有效。當斜向操作操縱桿會發現機器人會有動作,其實這是垂直方向的運動,不要理解錯哦!其他設定理解方式一樣,就不再贅述。
3轉到
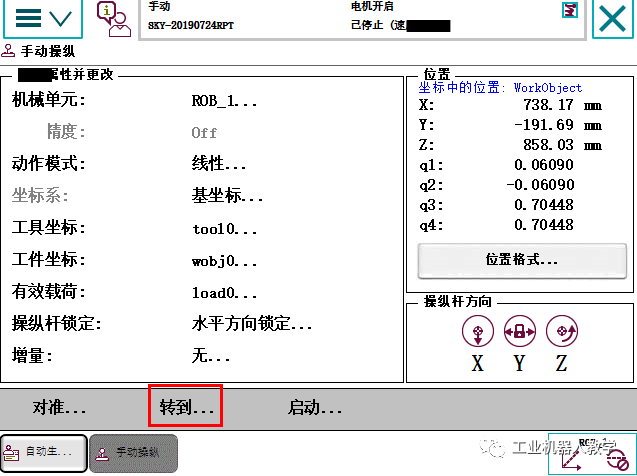
所在位置:主菜單-手動操縱-轉到…
使用說明:根據當前參考坐標系,快速移動機器人至指定位置。
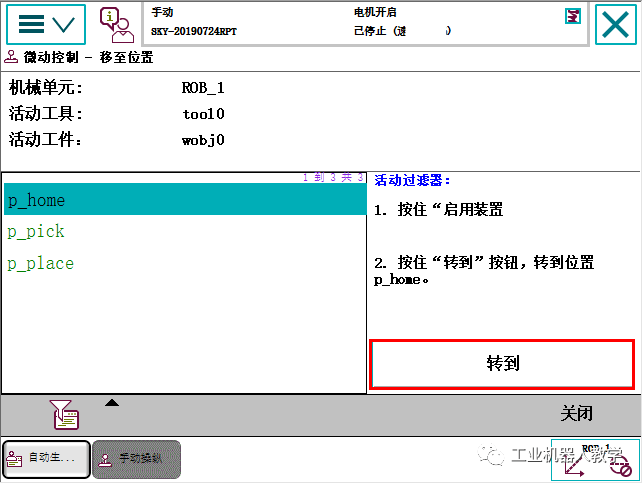
選中p_home點,點擊上電后,長按轉到按鈕,則機器人會運動至參考工具坐標為tool0,參考工件為wobj0的p_home位置點。這與在程序編輯器中的“移至位置”功能一致。


相關課程
東莞智通教育
認證等級
東莞智通教育
已獲好學校V2信譽等級認證
信譽值
與好學校簽訂讀書保障協議:
 官方授權聲明
官方授權聲明
尊敬的平臺會員您好,[東莞智通教育]資質文件正在審核中。如需了解[東莞智通教育]服務明細或申請試聽服務,
請點擊:聯系客服。















 粵公網安備 44010602004272號
粵公網安備 44010602004272號